智能家居 毫米波
传统的毫米波雷达信号处理流程,框图如下:
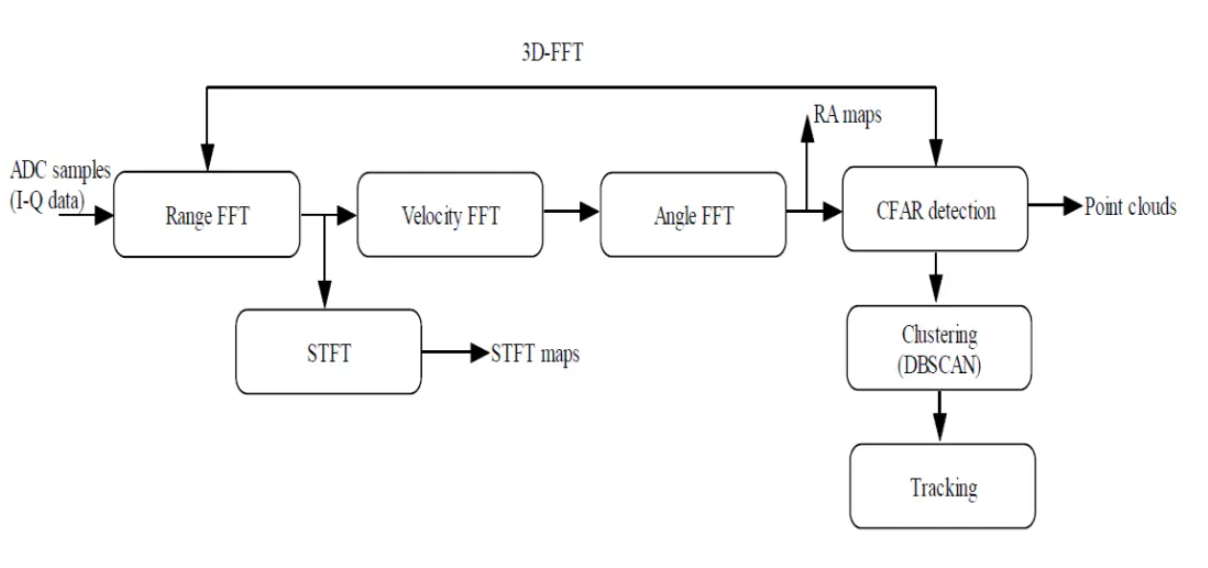
CFAR(Constant False Alarm Rate,恒虚警率)算法是一种在雷达和信号处理领域广泛使用的目标检测算法,其主要目的是在不同的背景噪声水平下保持恒定的虚警率。这种算法特别适用于在复杂和变化的环境中检测目标。
DBSCAN(Density-Based Spatial Clustering of Applications with Noise)是一种基于密度的空间聚类算法,DBSCAN的主要特点是能够发现任意形状的簇,并且能够识别和处理噪声。
Tracking基于卡尔曼滤波的轨迹跟踪是一种利用卡尔曼滤波进行目标位置估计的方法。它将目标的运动模型表示为一组线性方程,利用卡尔曼滤波对目标位置进行估计和预测。
1、一种通用的人体跟踪和识别算法,框图如下:
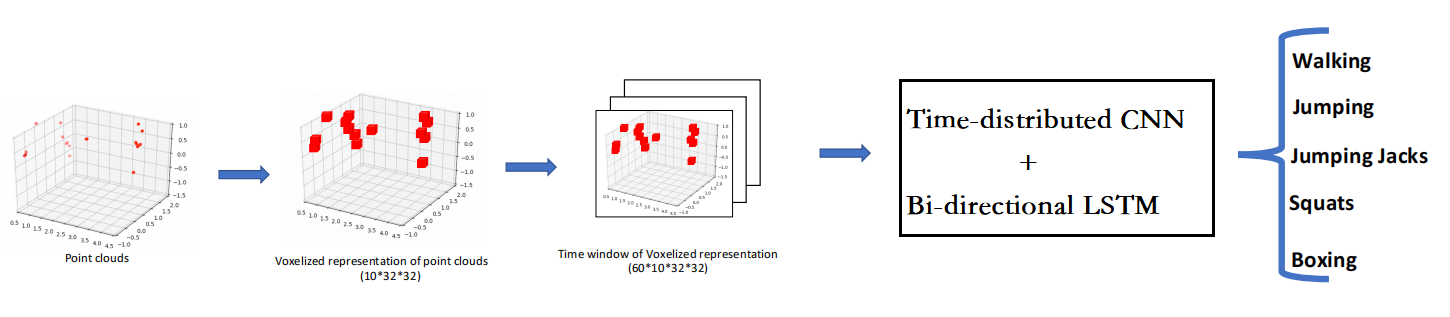
3D点云经过处理分组后输入神经网络,网络输出人体行为。
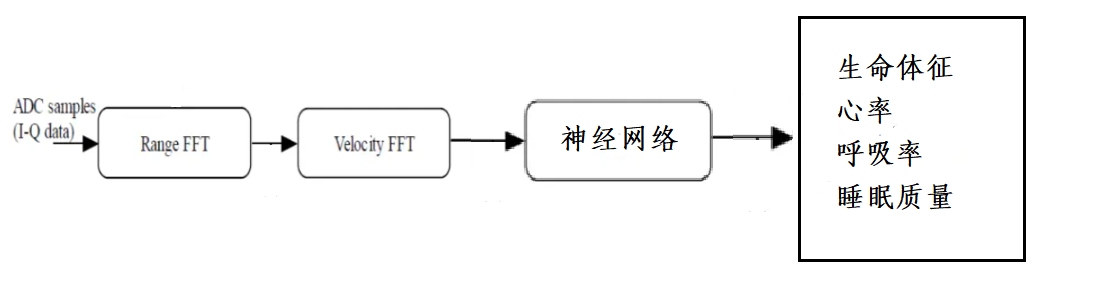
2、一种通用的基于毫米波的生命体征监测神经网络,框图如下: